三重大学工学部電気電子工学科
電気システム工学講座制御理論グループのページ
三重大学工学部電気電子工学科
電気システム工学講座制御理論グループのページ
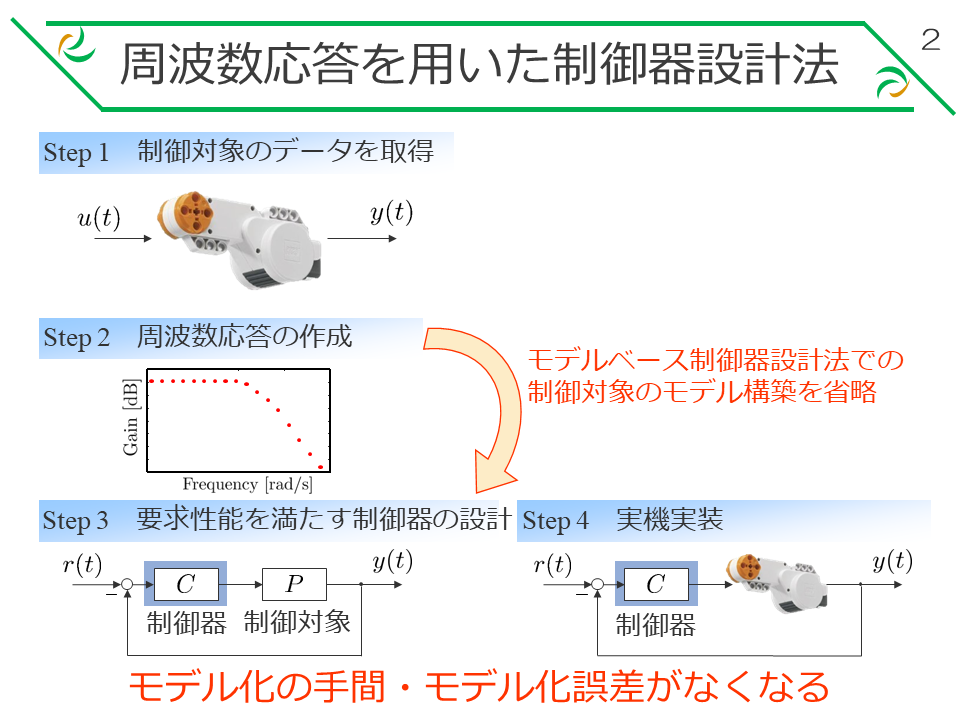
制御工学の初学者はまず古典制御について勉強をすると思います。古典制御における制御器の設計法としては 限界感度法やステップ応答法などモデルを用いず,制御対象の応答に基づいて設計を行う方法もありますが, 開ループ特性におけるループ整形が代表的なものとして紹介されています。 ループ整形においてはPID補償や位相進み・遅れ補償のパラメータを調整しながら良好な開ループ特性に 近づけるよう整形をするわけですが,これがなかなかに手間が掛かり,所謂職人技を必要とすると言われています。 周波数応答ベースの設計アプローチでは,制御対象の周波数応答を用い,各周波数点において開ループ特性が満たすべき制約を記述し, すべての周波数点で制約を満たし,目的関数を最小化する制御器を設計する手法となります。 モデルベースの制御器設計手法は制御器を解析的に求めることができるのに対し,本アプローチでは評価している 周波数点で制約を満たしているに過ぎず,必要条件を満たしているに過ぎません。 しかし,十分に細かな周波数分解能で評価することで実用上問題のない制御器を設計することができます。 また,制御対象の周波数応答が得られれば設計が可能であるため,必ずしも伝達関数モデルや 状態空間表現などの制御対象の数式モデルを必要としない点もデータ駆動型アプローチと同様の利点として挙げられます。 また,ロバスト性能問題や多目的制御問題なども簡単に記述することができる点も魅力の一つです。 現在の研究課題として,非整数次制御器の設計,ロバスト性能条件を満たすフルパラメトライズド制御器の設計, ゲインスケジューリング制御器の設計,などに取り組んでいます。
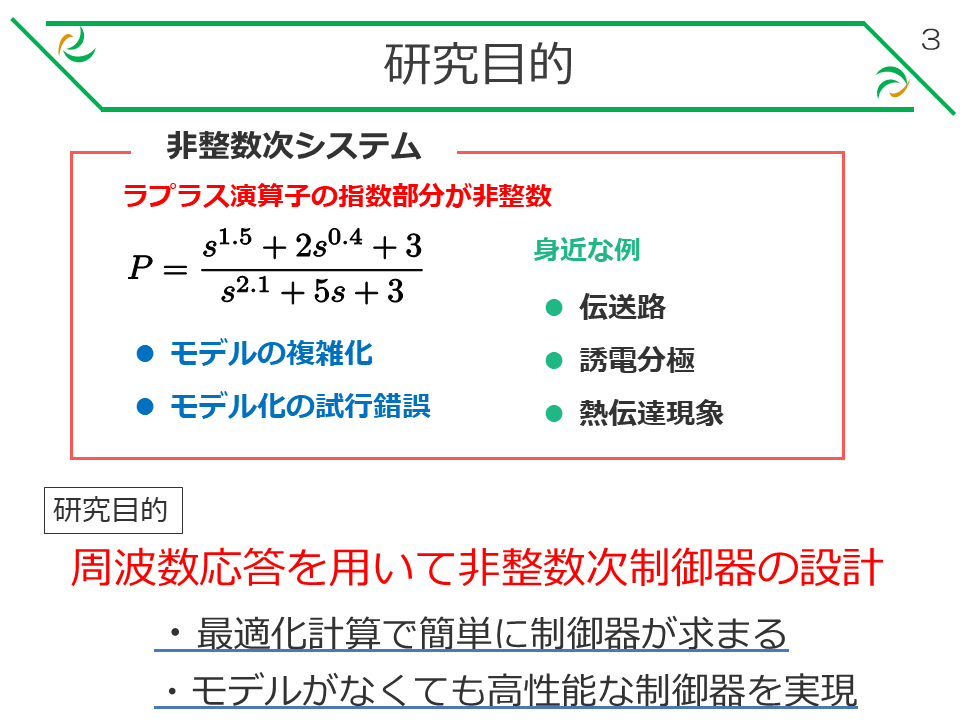
近年,制御工学の分野で非整数階微積分を導入した非整数次制御の研究が注目されている。 非整数次制御系では従来の整数次制御系の間の特性が補間できることから精密なモデリングなどに利用されている。 しかし,現状の非整数次制御器設計法は,実験的による試行錯誤や,アルゴリズムが複雑であることなどの問題がある。 要求仕様に基づいた非整数次制御器の設計がより簡単に行えるようになれば,非整数次制御の有用性がより一層高まると考えられる。
そこで本研究では周波数応答を用いた制御器設計法を応用することで,ナイキスト線図に基づいた非整数次制御器の設計法を提案し,従来よりも簡易に制御器パラメータを導出することを目的とする。 要求仕様として,フィードバック制御系において,開ループ伝達関数がゲイン交差角周波数付近での位相の変化を少なければ,制御対象のパラメータ変動に対してロバストな制御系が設計できる。 そこで,非整数次制御器により,一定の位相余裕を満足する制御器設計法についての研究を行っている。
